Das bestimmt am meisten diskutierte Thema im Umfeld des autonomen Fahrens ist die funktionale Sicherheit. Insbesondere stellt sich dabei die Frage: Wie lässt sich nachweisen, dass ein autonomes Fahrzeug tatsächlich so sicher ist, dass es am öffentlichen Straßenverkehr teilnehmen kann?
Herkömmliche Fahrzeuge: Zulassung auf Basis von Prüfprotokollen
Aktuell müssen in Deutschland neue Fahrzeugmodelle bzw. Fahrzeugteile zugelassen werden. Hierbei greifen verschiedene nationale und internationale Regeln – z. B. die Regeln der Economic Commission for Europe (ECE) oder die Allgemeine Betriebserlaubnis in Deutschland für Teile und Komponenten, welche nicht unter die ECE fallen.
Der Fachbegriff dazu lautet Homologation und bedeutet im ursprünglichen Sinne des Wortes so viel wie die Bestätigung von Schriftstücken. Dies spiegelt auch die gängige Praxis wieder: Anhand von Prüfprotokollen müssen Fahrzeug und Teilehersteller nachweisen, dass die Anforderungen zur Zulassung erfüllt sind.
Bei mechanischen Teilen, z. B. einer Bremsscheibe, ist das noch relativ einfach machbar. Zudem stehen hierzu über lange Jahre in der Ingenieurskunst optimierte Verfahren zur Werkstoffprüfung zur Verfügung.
Ganz anders sieht es in punkto Zulassung bei autonomen Fahrzeugen aus: Um auf ein akzeptierbares Sicherheitsniveau zu kommen, wären mehrere Milliarden Kilometer an Testfahrten erforderlich – richtig: Milliarden. Zur Einordnung: Der Abstand zwischen Sonne und Erde beträgt gerade mal knapp 150 Millionen Kilometer.
Wie sieht das in der Praxis aus?
Hier stellen sich für mich die folgenden Fragen:
Wieso Milliarden? Woher kommt diese, im wahrsten Sinne des Wortes astronomische Zahl?
Wie realisierbar? Welche Alternativen zu realen Testfahrten gibt es in der virtuellen Welt?
Steht Quantität für Qualität? Ist die Anzahl der gefahrenen Kilometer überhaupt eine richtige Kenngröße, um die Testqualität zu beurteilen?
Der Grund für mehrmals zur Sonne und zurück
Starten wir mit dem ersten Punkt. Sehr intensiv haben sich unter anderem Walther Wachenfeld und Hermann Winner in „Die Freigabe des autonomen Fahrens“ damit beschäftigt. Ausgangspunkt sind dabei Überlegungen zur Wahrscheinlichkeitsrechnung, und hier speziell die Eintrittswahrscheinlichkeit eines Ereignisses.
Als Datenbasis gilt die Unfallstatistik. Wird zum Beispiel als Ausgangsgröße die Anzahl der tödlichen Unfälle pro Kilometer herangezogen, so sind dies aktuell 210 Millionen Kilometer. Das heißt: Rein statistisch passiert alle 210 Millionen gefahrene Kilometer ein Unfall mit Todesfolge – leider.
Theorie: Statistische Sicherheit
Vereinfacht ausgedrückt muss somit ein autonomes Fahrzeug mehrmals eine Strecke von 210 Millionen Kilometern zurücklegen. Erst wenn dabei im Schnitt weniger als 1,0 Unfälle mit Todesfolge aufgetreten sind, kann mit statistisch hinreichend genauer Sicherheit die Aussage getroffen werden: Das autonome Fahrzeug ist sicher, und sogar sicherer als manuelles Fahren.
Praxis nicht praktikabel – die Lösung liegt in der virtuellen Welt
In der realen Welt sind solch große Fahrstrecken nicht mehr realisierbar. Deshalb wird in zwei Richtungen an einer Lösung des Problems gearbeitet:
Virtuelle Fahrversuche mit Verkehrsszenarien (real und synthetisch)
Fokus auf die Testszenarien statt reine Anzahl der Kilometer
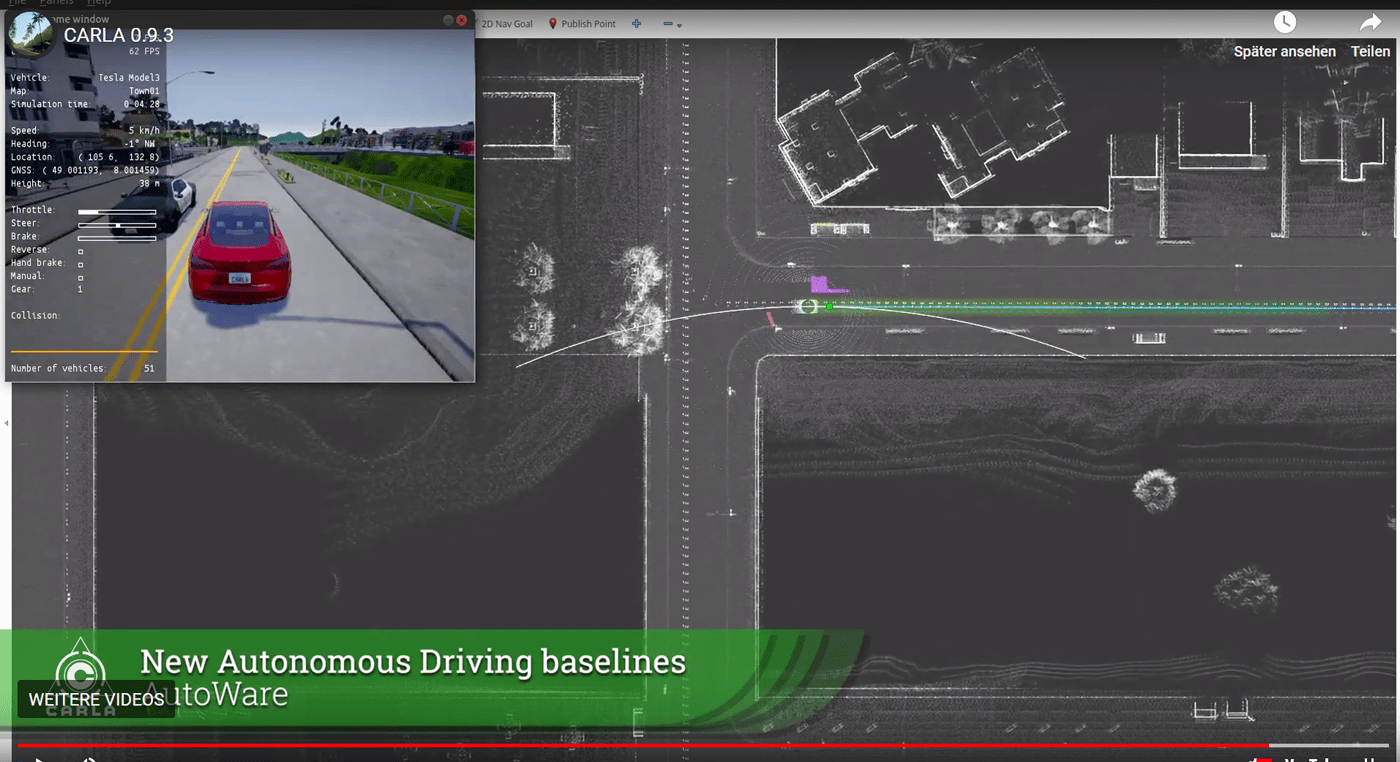
Die zu fahrenden Teststrecken werden virtuell, das heißt mit einem digitalen Modell, dem sogenannten „Digital Twin“ (Digitaler Zwilling) des Fahrzeugs, in einer Simulationsumgebung getestet.
Dabei ist es dann auch wichtiger, ausreichende und gute Szenarien zur Verfügung zu haben. Die reine Anzahl der Kilometer ist nicht so aussagekräftig – die gemeisterten Gefahrensituationen sind das Entscheidende.
Hier ein Beispiel, wie das in der Praxis aussehen kann [Bildquelle: Dosovitskiy17 (s.u.)]:
Derzeit beschäftige ich mich im Rahmen eines NTT DATA internen Forschungsprojektes intensiv mit dem Thema. Wie immer freue ich mich über Ihr Feedback und Fragen dazu.
Autonomes Fahren: Schwerpunkt Security – Lesen Sie unser neues Whitepaper!
Antworten aus erster Hand in punkto Sicherheit für autonome Fahrzeuge gibt Ihnen auch unser neues Whitepaper aus der Feder unseres Schwesterunternehmens NTT Security. Werfen Sie auf jeden Fall einen Blick hinein. Hier geht’s zum kostenfreien Download.
Bildquelle: Alexey Dosovitskiy, German Ros, Felipe Codevilla, Antonio Lopez, Vladlen Koltun. CARLA: An Open Urban Driving Simulator. Proceedings of the 1st Annual Conference on Robot Learning 2017